,這就是筆者將自聚焦光纖的傍軸光線分成近軸光線和遠(yuǎn)軸光線的原因。手動光纖模具焊接機(jī)
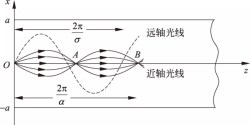
圖5 自聚焦光纖中的近軸光線與遠(yuǎn)軸光線
可以預(yù)言,由于自聚焦光纖光線的這種聚焦特性
,模式色散只來源于遠(yuǎn)軸光線,相較于階躍折射率多模光纖光線根本沒有聚焦特性
,自聚焦光纖的模式色散顯然比起階躍折射率多模光纖要小很多
,這在隨后的討論中將被證實(shí)。手動光纖模具焊接機(jī)
在討論遠(yuǎn)軸光線時,利用泰勒展開
,保留到αx的二階項(xiàng)
,公式(9)變成
下面我們用微擾方法討論式(12) 。考慮遠(yuǎn)軸光線仍具有正弦擺動特性
,但是空間頻率有所不同

將式(13)代入式(12) ,得到

其中遠(yuǎn)軸光線的空間周期變成2π/σ,不是常數(shù) 。因此在計(jì)及遠(yuǎn)軸光線后
,各光線不再可以周期性聚焦,存在著時間差
。從式(14)可見
,遠(yuǎn)軸光線的空間頻率與近軸光線有差別,隨著擺動幅度C的不同而不同
。最遠(yuǎn)的遠(yuǎn)軸光線幅度為a
,則遠(yuǎn)軸光線的最大空間頻率滿足手動光纖模具焊接機(jī)

或者

可見,由于αa?1,遠(yuǎn)軸光線的空間頻率和近軸光線的空間頻率還是十分接近的與α2a2相差α4a4
,這是一個非常小的量。當(dāng)忽略α4a4時
,遠(yuǎn)軸光線還原為近軸光線,模式色散將無法計(jì)算
?div id="jpandex" class="focus-wrap mb20 cf">;蛘哒f在計(jì)算光程差(或者時延差)時近似展開至少要保留到α4a4項(xiàng)。
令最大模式的對應(yīng)光線軌跡函數(shù)為手動光纖模具焊接機(jī)
x=asinσmaxz

計(jì)算最大模式傳輸L距離后的光程
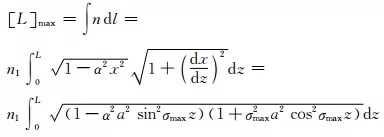
將上式被積函數(shù)做泰勒展開,保留到α4a4項(xiàng)
,則式(18)變?yōu)?/span>
式(19)的后一積分項(xiàng)在積分跨越2π/σmax點(diǎn)時為零,則

由光程差與時間差的關(guān)系,自聚焦光纖的模式色散為

這個結(jié)果與WKBJ近似法計(jì)算的結(jié)果完全一致[1,2]。將n1=1.500和n2=1.489代入式(21),得Δτmax=0.25ns/km
,比階躍折射率多模光纖小兩個數(shù)量級。
總結(jié)一下第1節(jié)的主要結(jié)論:(1)近軸光線近似與費(fèi)馬原理預(yù)計(jì)的等光程性等價,不能用近軸近似結(jié)果來計(jì)算自聚焦光纖的模式色散; (2)自聚焦光纖的模式色散來源于遠(yuǎn)軸光線,利用遠(yuǎn)軸近似可以得出自聚焦光纖模式色散的正確結(jié)果; (3)由于聚焦特性的不同,自聚焦光纖的模式色散比階躍折射率多模光纖小兩個數(shù)量級。手動光纖模具焊接機(jī)